この記事でわかること
・高調波規制と力率改善の関係
・力率改善(PFC)回路の動作原理
・動作モード(連続、臨界)の説明
商用電源に接続する機器は高調波規制「IEC 61000-3-2」をクリアする必要があります。
具体的には、入力電流の高調波成分を減らします。
高調波成分が減ると、力率が良く(1に近づく)なります。
PFC(power factor correction :力率改善)回路によって、
入力電流の高調波成分を低減することができます。
本記事では、高調波規制の内容と、
高調波電流が増えると、なぜ力率が低下するのか?
また、PFC回路によって、高調波電流が減る仕組みと、
2種類の動作モード(臨界、連続)について解説します。
高調波規制 IEC61000-3-2について
日本では国際規格IEC 61000-3-2をベースにした国内規格JIS C 61000-3-2があります。
これは法的な強制力はないもの、殆どの製品は遵守しています。
また、欧州や中国等では強制規格となっている為、
商用電源に接続する装置は、この規格をクリアする必要があります。
規格の内容ですが、クラスAからDまで、4つのクラスに分類されています。
ざっくり表現すると以下になります。
クラスA:クラスB~Dに該当しない機器
クラスB:電動工具(可搬型)
クラスC:照明機器
クラスD:パソコン、TV等
つまり、一般的な電子機器はクラスAに該当します。
クラスAの高調波電流の規制値は以下になります。
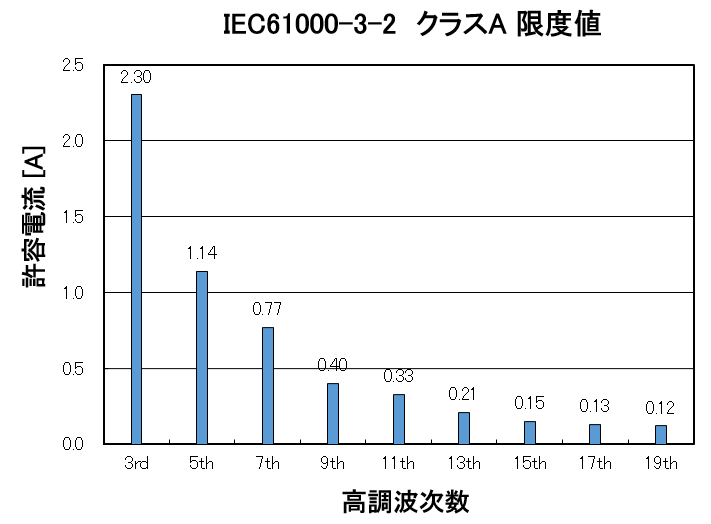
この規格は、1相あたりの定格電流が16A(JIS では20A)
までの機器が対象となっています。
規格では2,4,6,8次といった偶数次の高調波も規定されていますが、
正弦波の場合、殆ど存在しない為、ここでは省略しています。
実際の評価試験では、奇数次の高調波電流を
パワーアナライザやクランプテスター等を用いて計測します。
高調波の発生と力率との関係
高調波成分が大きくなると、正弦波が歪みます。
例えば、基本周波数50㎐の正弦波(青)に対して、
基本波の30%の振幅を持つ3次高調波(150㎐ 赤)が加わると、
右側の合成波は歪んだ形(緑)になります。
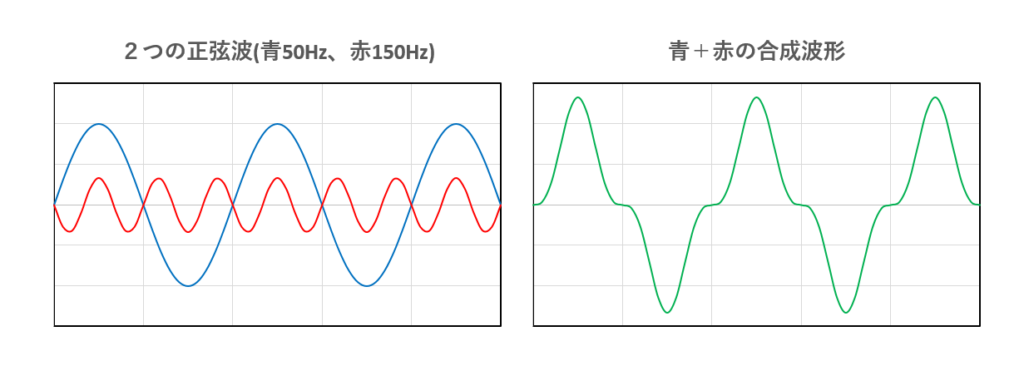
何故、このような波形を見せたかと言うと、
実際のAC/DC変換回路において発生する電流波形と似ているからです。
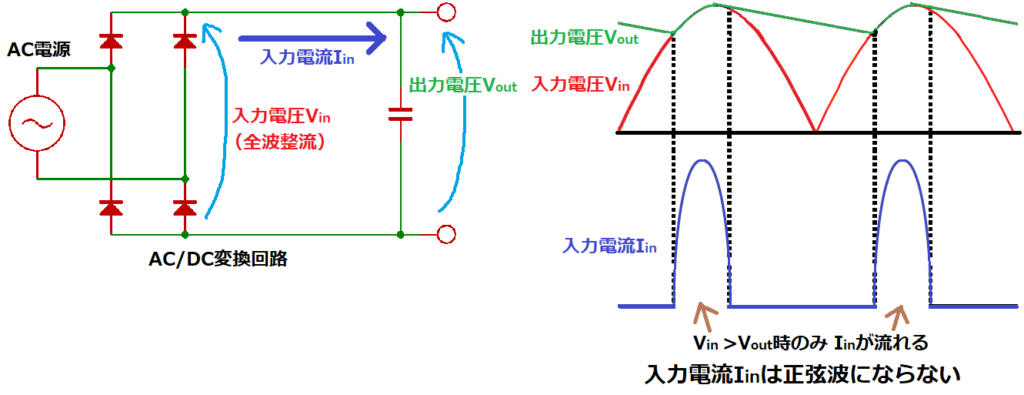
この回路は、AC電圧をブリッジダイオードで全波整流後、
コンデンサで平滑してDC電圧Voutを出力します。
この時、入力電圧Vin(赤)が、
出力電圧Vout(緑)よりも高くないと入力電流Iinが流れません。
しかしVinは正弦波を全波整流した波形なので、
必ずVoutよりも低い期間が存在します。
このため、図のようにVin>Voutの区間だけ電流Iinが流れます。
この入力電流波形は、先程の3次高調波を合成した波形と類似している事から、
入力電流に高調波成分が存在する事を意味しています。
次に、高調波と力率の関係について説明します。
力率PFは、電圧波形と電流波形の位相差θより、
PF=COSθ
ですが、高調波成分を考慮すると、
この式に全高調波歪THD(Total Harmonic Distortion)が加わります。
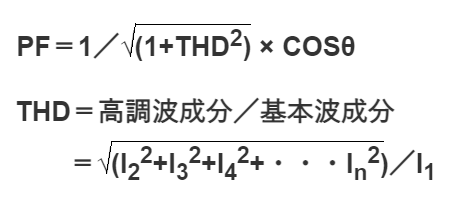
つまり、高調波電流が増えるとTHDが大きくなり、力率PFが小さくなります。
先程の例で示した基本波の30%の3次高調波がある場合、THD=0.3なので、
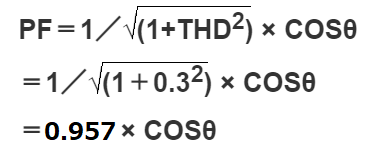
となり、元の力率の96%程度に低下することがわかります。
実際の回路ではLやC成分により、電圧ー電流間に位相差が存在するため、
COSθも1より小さくなる事から、力率は更に低下することになります。
PFC回路は入力電流を正弦波にすることでTHDを小さくし、
力率PFを改善しているのです。
PFC回路の種類と動作原理
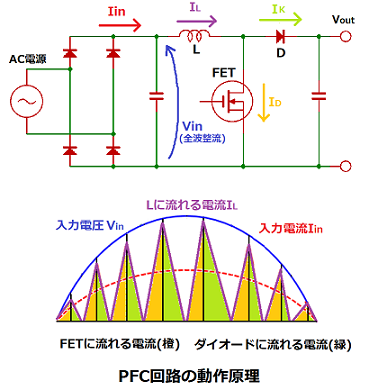
PFCの基本回路を示します。
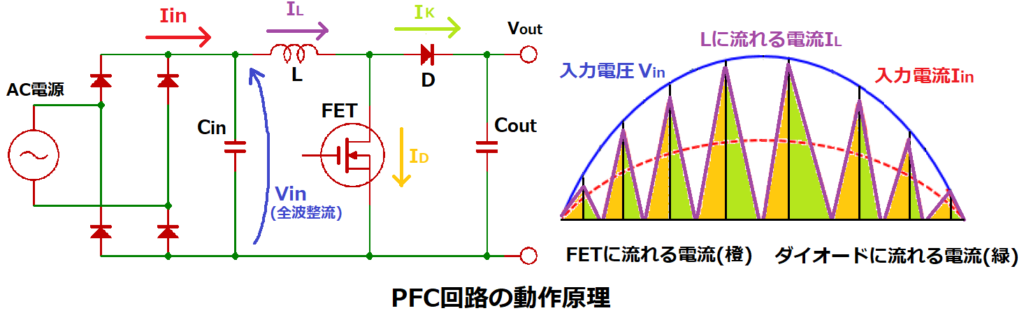
ブリッジダイオードで整流する所までは、従来回路と同じです。
コイル、FET、ダイオードの3つがPFC回路の基本構成になります。
ここで、コイルが重要な役割を担います。
コイルの働きは、流れる電流を維持しようとする事です。
つまり、電流が減りそうになったら、電流を流しやすくし、
増えそうになったら、電流を流れにくくしようとします。
まず、FETがONすると、コイル電流ILは全てFETに流れます。
IL=ID
回路がショートする形になるので、IDは過大に流れようとします。
しかし、先程説明したコイルの働きにより、
IDは直ぐには大きくならず、徐々に上昇します。(橙色)
次にFETがOFFすると、コイル電流ILは全てダイオードDに流れます。
IL=IK
この時、従来回路なら、入力Vinより出力Voutの方が電位が高い(Vin<Vout)と、
入力電流Iinは流れなくなりますが、コイルの働きにより電流を維持しようとするので、
ダイオードに流れる電流IKは直ぐにはゼロにならず、徐々に減少します。(緑色)
これらの動作により、コイルに流れる電流ILは三角波となります。
IL=ID(FET ON時 三角波の左半分(橙))
=IK(FET OFF時 三角波の右半分(緑))
これを繰り返しスイッチング制御することで、
コイル電流のピーク値が正弦波状になるようします。
入力電流Iinは、入力コンデンサCinによりコイル電流ILを平均化したものになるので、
図のように正弦波(赤色破線)になります。
PFC回路の動作については、
コイル電流がゼロからピーク値まで大きく変化する臨界モードの他に、
コイル電流がゼロまで下がらず小刻みに変化する連続モードがあります。
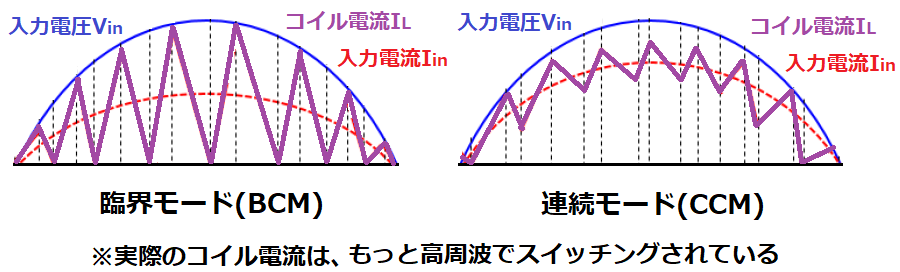
また、両モードとも、入力電圧がゼロクロス付近では、
コイル電流が断続的に流れる不連続モードになります。
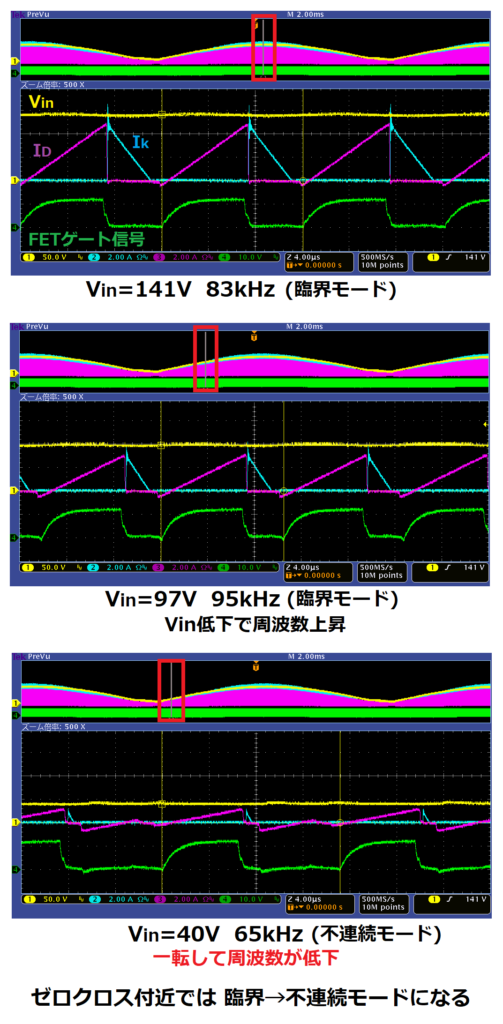
臨界モード(BCM)動作
臨界モードは、BCM (Boundary Current Mode)又は、
CRM (CRitical conduction Mode)とも呼ばれています。
この方式は、FETのON期間は負荷に応じて決定します。
ここで言う負荷というのは、PFC回路からの出力電流Ioutの大きさの事です。
出力電流を増やすには、コイル電流を増やす必要があるので、
ON期間を増して、コイル電流を大きくします。
この制御では、負荷(出力電流)が一定ならON期間も一定となります。
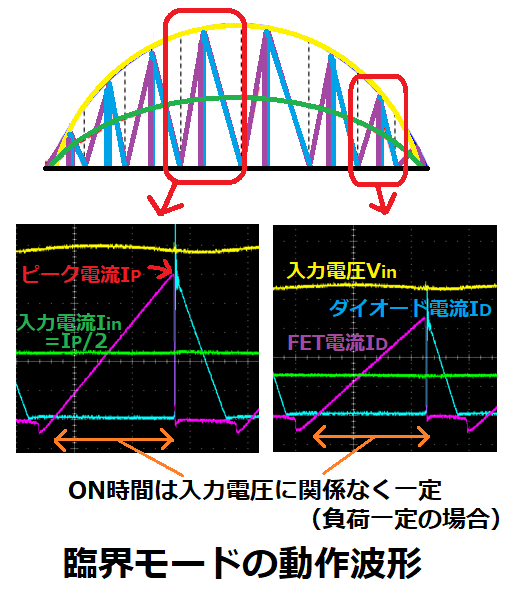
コイル電流のピーク値を式で表すと、
ピーク電流IP=Vin×Ton/L
L:コイルのインダクタンス[H]
この式より、ON期間Tonが一定でも、
ピーク電流IPは入力電圧Vinが高ければ大きくなり、
低ければ小さくなることがわかります。
ON期間が終了し、FETがOFFすると、コイル電流が減少していき、
ゼロになったら再びONするように制御します。
この動作により、OFF期間は入力電圧Vinが高い時は長くなり、低い時は短くなります。
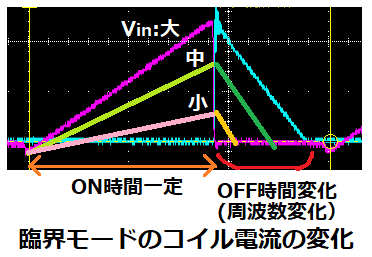
つまり、負荷が一定の場合、ON期間は固定となり、
OFF期間は入力電圧Vinに比例して長くなります。
これはVinに応じてスイッチング周波数が変化することを意味します。
(Vinが高くなると周波数が低下する)
コイル電流は三角波になるので、その平均値はピーク値の半分になります。
この平均値が入力電流になるので、
Iin=IP/2
となります。
このため、臨界モードでは入力電流の2倍以上流せるコイルが必要になります。
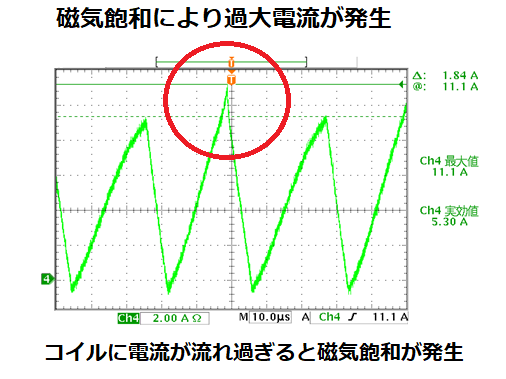
入力電流が大きくなり、コイルに電流が流れ過ぎるとインダクタンスが低下します。
そうなると、コイルは僅かな抵抗成分しかない電線と同じになるので、
ショート状態となり、過大電流が流れます。
この現象を磁気飽和と言います。
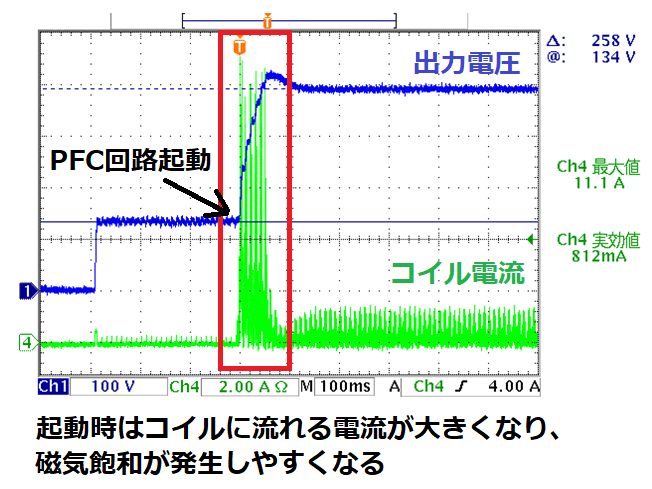
特に起動時はコンデンサに充電電流が流れるので、
通常時より大きなコイル電流が流れることから、磁気飽和が起こりやすくなります。
磁気飽和により過大電流が流れると、
うなり音(コイル鳴き)が発生したり、FETが壊れる場合があります。
うなり音が発生する理由ですが、コイル電流の増減が大きいと、
電磁力によりコイル内のコアが振動する為です。
この振動が可聴域(20Hz~20kHz)の範囲内にある
商用周波数のサイクルで行われる為、音が聞こえるのです。
一般的には同じインダクタンスなら、
コイルが小さい程、磁気飽和は起きやすくなります。(備考参照)
従って、入力電流が大きい回路では大きなコイルが必要になります。
以上のような理由により、臨界モードは大電力向きではありませんが、
コイル電流がゼロの時にONする事から、スイッチング損失を小さくできる為、
200~300W以下の電力回路に使用されます。
(スイッチング損失が小さい理由は記事の後半で解説)
<備考>
磁気飽和が発生し、インダクタンスが低下する特性を直流重畳特性と言います。
この直流重畳特性が悪いと、コイル電流が小さくても磁気飽和が発生してしまいます。
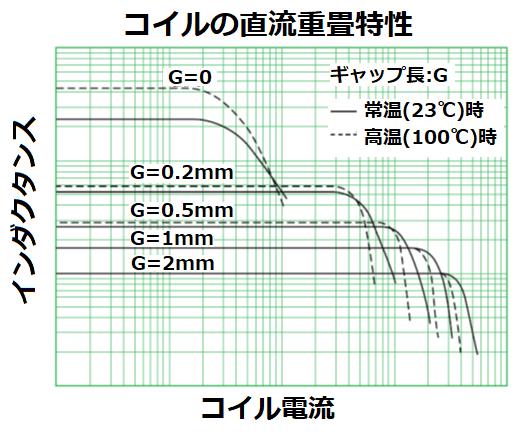
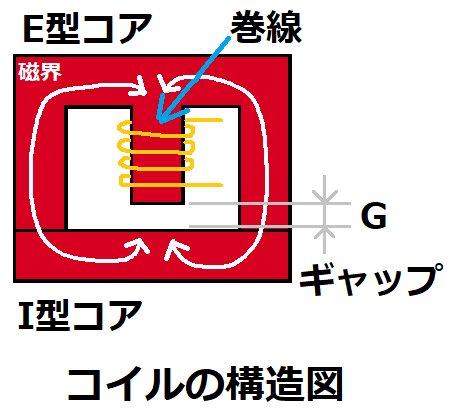
直流重畳特性を良くするには、コイルの一部に隙間(ギャップ)を設け、
ギャップ長を大きくすることで、コイル電流が大きくなっても
インダクタンスの低下を抑える事ができます。
しかし、グラフから分かるように、ギャップを設けると、
インダクタンスの初期値(電流増加前の値)が小さくなってしまいます。
このため、ギャップを設けても必要なインダクタンス値を確保するため、
初期インダクタンス値を大きくできる(巻き数とコアの断面積が大きい)
コイルにする必要があるのです。
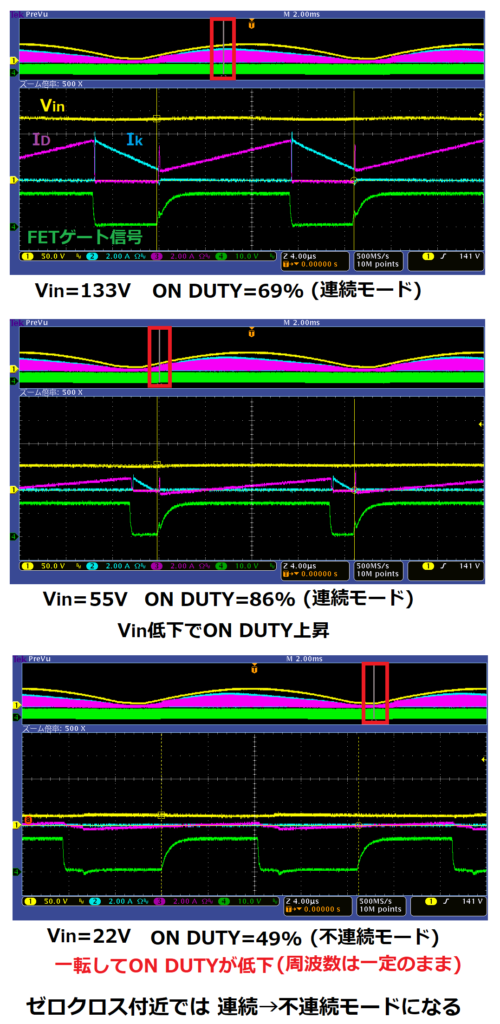
連続モード(CCM)動作
連続モードはCCM(Continuous Conduction Mode)とも呼ばれます。
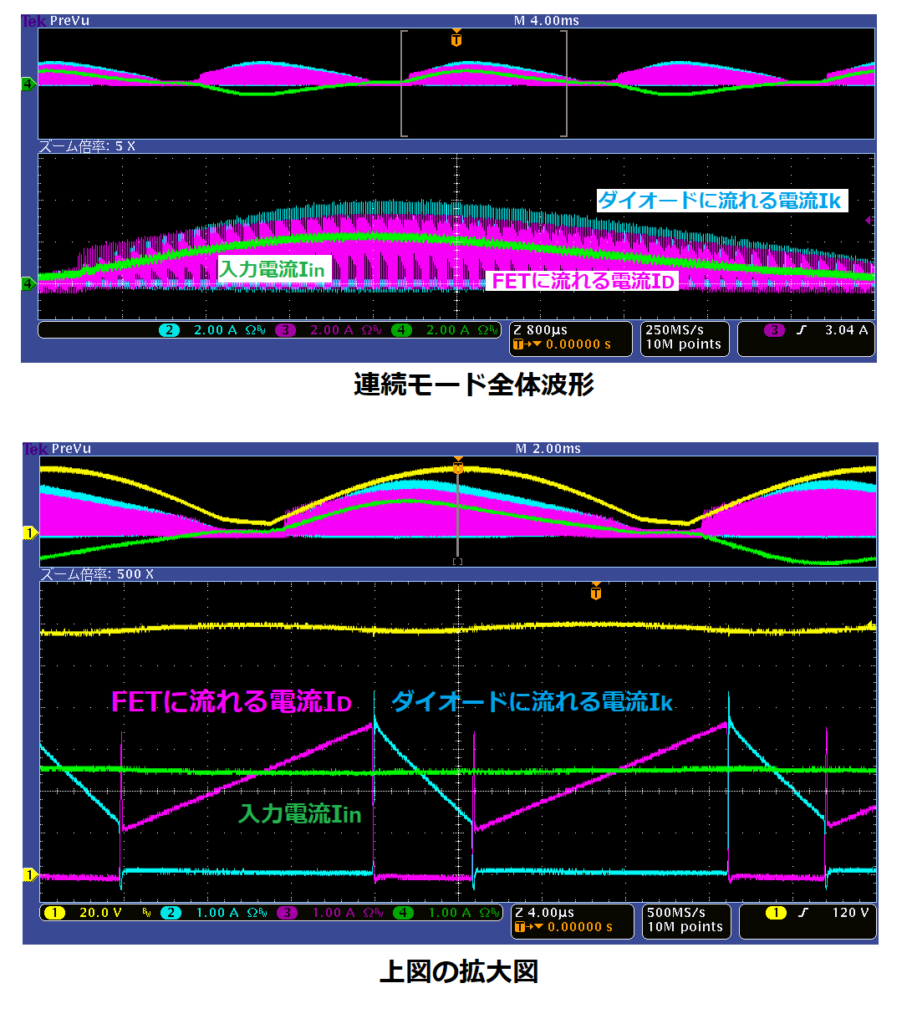
この方式はコイル電流がゼロになる前にFETをONします。
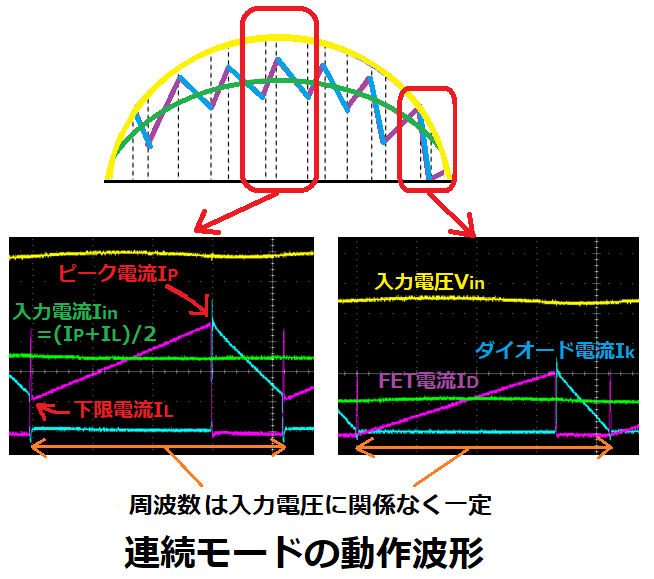
入力電流Iinは、ON時のコイル電流下限値ILをベースに、
三角波の振幅(IP-IL)の半分を加えた形になります。
Iin=(IP-IL)/2+IL
=(IP+IL)/2
上記の式より、
入力電流がコイルのピーク電流IPの半分になる臨界モードよりも、
入力電流をIL/2だけ大きくできることがわかります。
このため、連続モードは大電力回路に向いています。
この方式では、スイッチング周波数を一定にして制御します。
臨界モードではON期間固定で、OFF期間を調整していましたが、
連続モードは、ON DUTY(ON時間の割合)を調整します。
ON/OFF時のコイル電流の変化量ΔIは、
ΔI=(ピーク電流IP-下限電流IL)=Vin×Ton/L
となります。
ここで、インダクタンスLが大きければ、ΔIは小さくなります。
この制御ではコイル電流波形を小刻みに変化させるため、
三角波の振幅(つまりΔI)を小さくする必要があるので、
インダクタンスLは大きい方が望ましいです。
ちなみに、臨界モードの場合はピーク電流を大きくする必要がある為、
インダクタンスLはあまり大きくない方が良いです。
そして、ΔIを小さくするため、
Vinが高い時→ON DUTYを 小
Vinが低い時→ON DUTYを 大
となるように制御します。
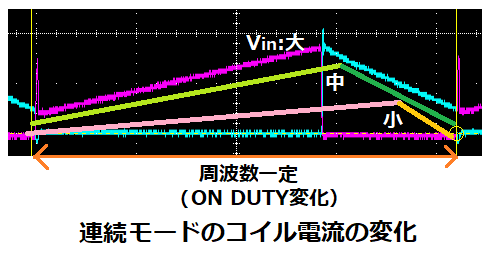
このON DUTYはVinだけで決まるので、負荷(出力電流)の大きさは関係ありません。
このため、Vinが同じ値の部分の波形を見た場合、
負荷(出力電流)が変化してもON DUTYは変わりません。
そして、負荷が変動しても周波数は変化しません。
つまり、連続モードは常に周波数が一定となります。
このように、スイッチング周波数が固定だと、
その周波数だけを除去するフィルタを構成すれば良く、
ノイズ対策しやすいという利点があります。
負荷(出力電流)が大きくなると、
コイル電流は、三角波の振幅を維持したまま、下限電流ILだけ上昇します。
見た目には、三角波部分だけ上にスライドする形になります。
一方、負荷が小さくなると、下にスライドしていき、
ON時のコイル電流がゼロまで低下すると、臨界モードと同じ波形になります。
臨界モードと連続モードの波形を比較すると、
臨界モードに比べ、ON時のノイズが大きい事がわかります。
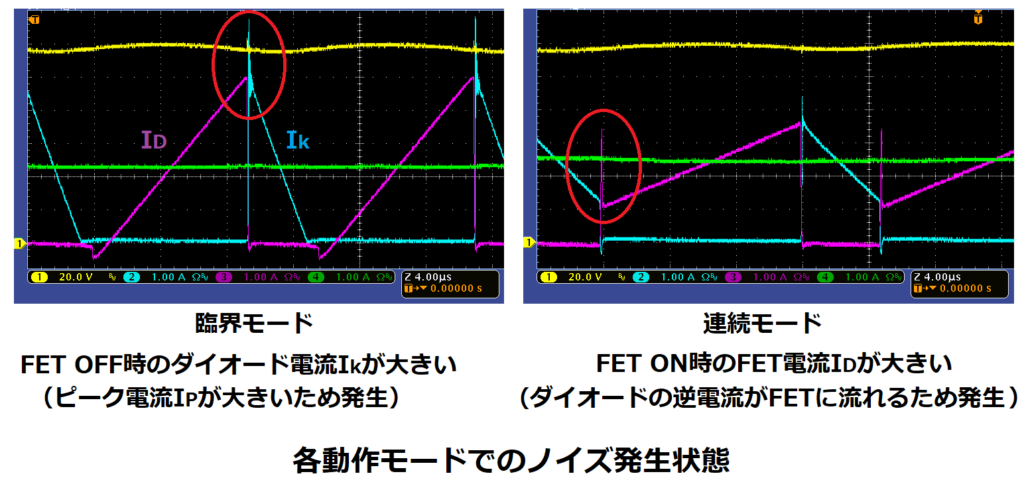
その理由ですが、ダイオードに順電流が流れている状態で、
急に逆電圧がかかると、ダイオードの特性上、瞬間的に逆電流が流れる為です。
この逆電流が流れる時間は、逆回復時間と呼ばれ、
逆電圧が印加される直前の順電流が大きい程、長くなります。
ダイオードからの逆電流はFETに流れ込む為、
ドレイン電流が一次的に急上昇することでノイズが発生しているのです。
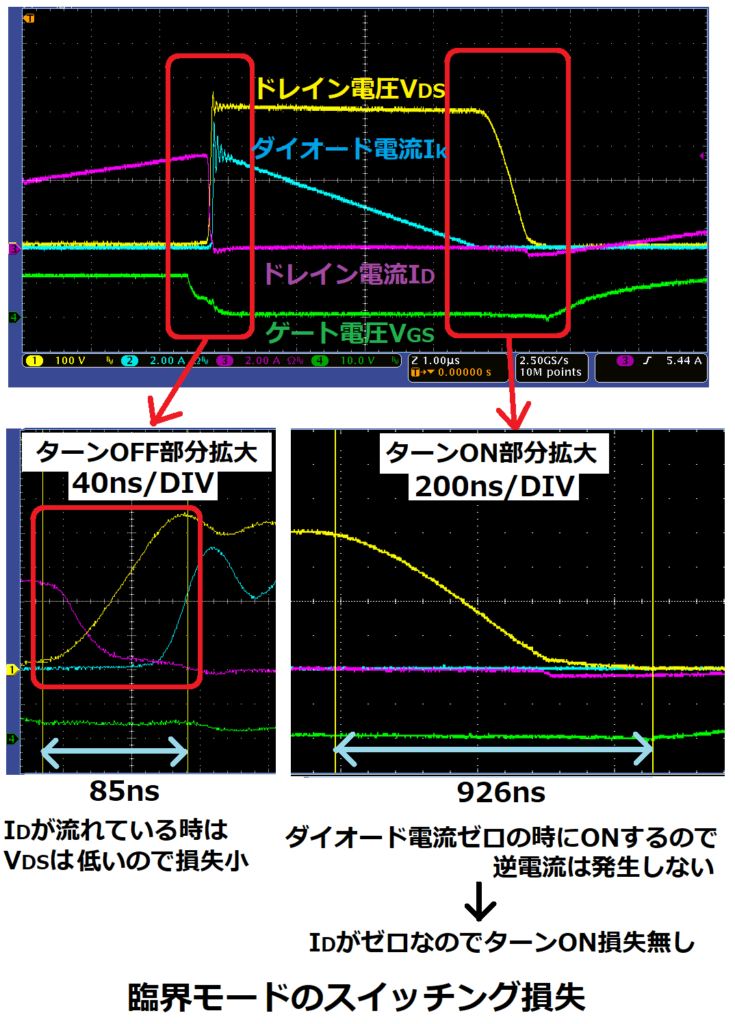
PFC回路のスイッチング損失
臨界モードと連続モードのスイッチング損失を比較してみます。
臨界モードの場合、
ターンOFF損失は発生しますが、
ターンON時については、コイル電流がゼロの時に行わるため、
ドレイン電流IDが流れないので損失が発生しません。
連続モードについては、
ターンOFF損失だけでなく、ターンON損失も発生しています。
これは、コイル電流がゼロでない時にFETがONするため、
ダイオードに逆電圧が印加されることで逆電流が発生し、
それがドレイン電流IDに流れ込みます。
このため、VDSが下がりきらないうちに、IDが急上昇してしまい、
ターンON損失が大きくなってしまうのです。
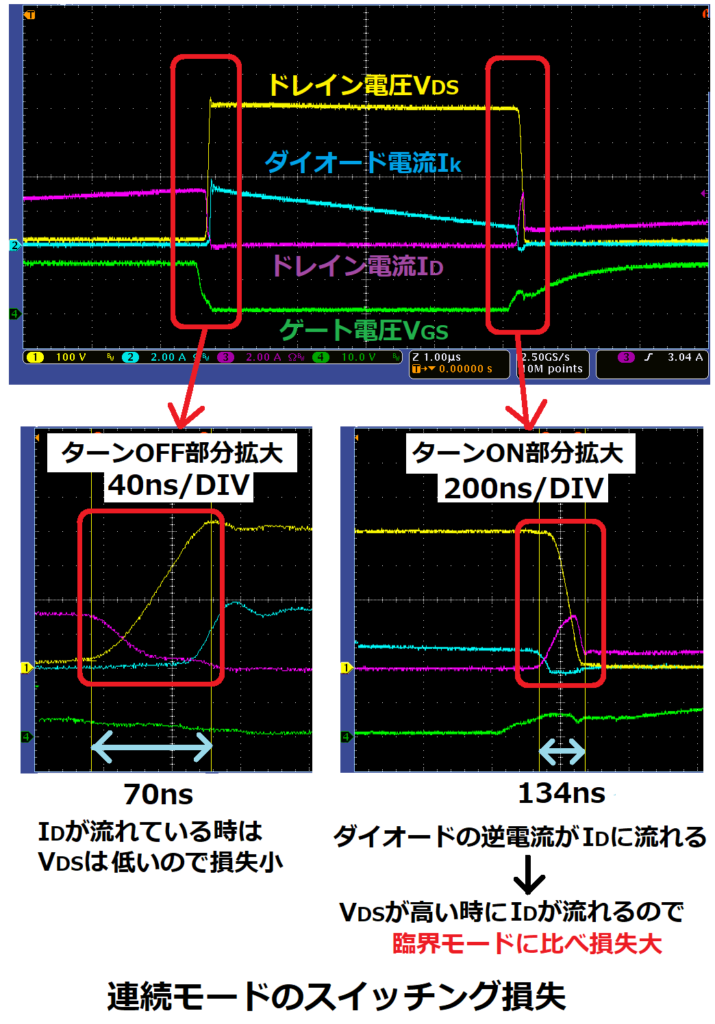
以上の理由から、臨界モードに比べ消費電力が増えてしまう欠点があります。
このため、連続モードで動作させる場合は、損失を少しでも低減させるために、
逆回復時間が短いファースト・リカバリ・ダイオード(FRD)を使う必要があります。
不連続モード(DCM)動作
入力電圧は正弦波なので、必ず電圧がゼロになる部分(ゼロクロス)が存在します。
この時、入力電流もゼロになります。
臨界、連続モードどちらで動作していても、無負荷時や、入力電圧がゼロクロス付近では、
入力電流が殆ど流れない為、コイル電流がゼロの区間が発生します。
このコイル電流が断続的に流れる状態を不連続モード(DCM)と呼びます。
DCM:Discontinuous Conduction Mode
臨界モードはON時間固定なので、コイル電流をゼロにするには、
その分周期を伸ばして(つまり、周波数を低下させて)
トータルのON期間を減らすことで、電流をほぼゼロにします。
これにより、臨界モードでは、入力電圧が低下すると周波数が上昇していきますが、
ゼロクロス付近では不連続モードとなり、周波数が一転して低くなります。
連続モードの場合は周波数固定なので、コイル電流をゼロにするには、
ON DUTYを減らすことで、電流をほぼゼロにします。
これにより、連続モードでは、入力電圧が低下するとON DUTYが大きくなりますが、
ゼロクロス付近では不連続モードとなり、ON DUTYが一転して小さくなります。
★トランジスタやFETの設計方法についてのまとめ記事です。
★基板の部品交換や修正で役立つ工具類を紹介しています。


