この記事でわかること
・DCファンの種類と特徴
・DCファンの使い方(速度制御、センサ検出)
・DCファン駆動回路の設計方法
PC内の冷却等に用いられるDCファンは速度制御がしやすく、
回転数を検知するセンサを内蔵した製品もあり、広く普及しています。
本記事では、DCファンの基礎知識(種類、特徴)から、
速度制御や回転センサ検出などの使い方を説明し、
ファン駆動回路の具体例についても解説します。
<注意点>
本記事はDCファンを使用する際の基礎知識を説明することが目的であり、
解説する製品の機能や回路の動作を保証するものではありません。
ここで紹介する設計方法が適切で無い場合がある為、
使用の際は、デバイスのデータシートを必ず確認の上、
回路への利用については自己責任でお願いします。
DCファンの基礎知識
DCファンを使用するにあたり、必要な用語の説明をします。
<風量(Q)>
1分間あたりに移動する空気の体積で、単位は[m3/min](立方メートル毎分)です。
別の単位で、CFM(Cubic Feet per Minute)(立方フィート毎分)もあります。
1[CFM]=0.0283[m3/min]
筐体内の温度上昇をΔTに抑えるのに必要な風量Qは下記式で求めます。
Q [m3/min] = H/ (20・ △T)
H:筐体の総発熱量 [W]
△T:筐体内の温度上昇値 [K](※1)
20:空気の比重×比熱より算出した定数(※2)
※1:ケルビン(絶対温度)[K]と摂氏[℃]は以下の関係となる。
0[K]=-273.15[℃]
※2:定数が20になる理由
空気の比重:1.2 [kg/m3] (20℃、1気圧時)
空気の比熱:1.01[kJ/(Kg・K)]
比重×比熱:1.2 [kg/m3]×1.01[kJ/(Kg・K)] ≒ 1200[J/(m3・K)]
これは空気の単位体積かつ単位温度あたりの熱量(ジュール)を表す。
ワットとジュールの関係は1[W]=1[J/s]なので、
1秒あたりの空気の体積と温度をかければ発熱量(ワット)が求められる。
W[W]=Q[m3/min]/60[s]×1200[J/(m3・K)]×T[K]
Qの式になるように変形すると、
Q[m3/min]/60[s]=W[W]/(1200[J/(m3・K)]×T[K])
Q[m3/min]/=W[W]×60[s]/(1200[J/(m3・K)]×T[K])
=W[J/min]/(20[J/m3・K)]×T[K])
となり、先程のQの式と照らし合わせた時、定数が20になることがわかる。
但し、ここで算出した風量は、筐体内で風の流れを阻害する物がない前提のため、
一般的には算出値の1.5~2倍の最大風量を持つファンを選定します。
この風の流れを阻害する力を圧力損失と呼び、
この圧力損失を上回る力(静圧)を持つファンが必要になります。
<静圧(P)>
空気を押し出す力で、大きいほど風を遠くまで送ることができます。
単位は[pa](パスカル)です。
別の単位で、inch H2O(水中インチ)や、mm H2O(水中ミリ)もあります。
1[inch H2O]=25.4[mm H2O]=249[Pa]
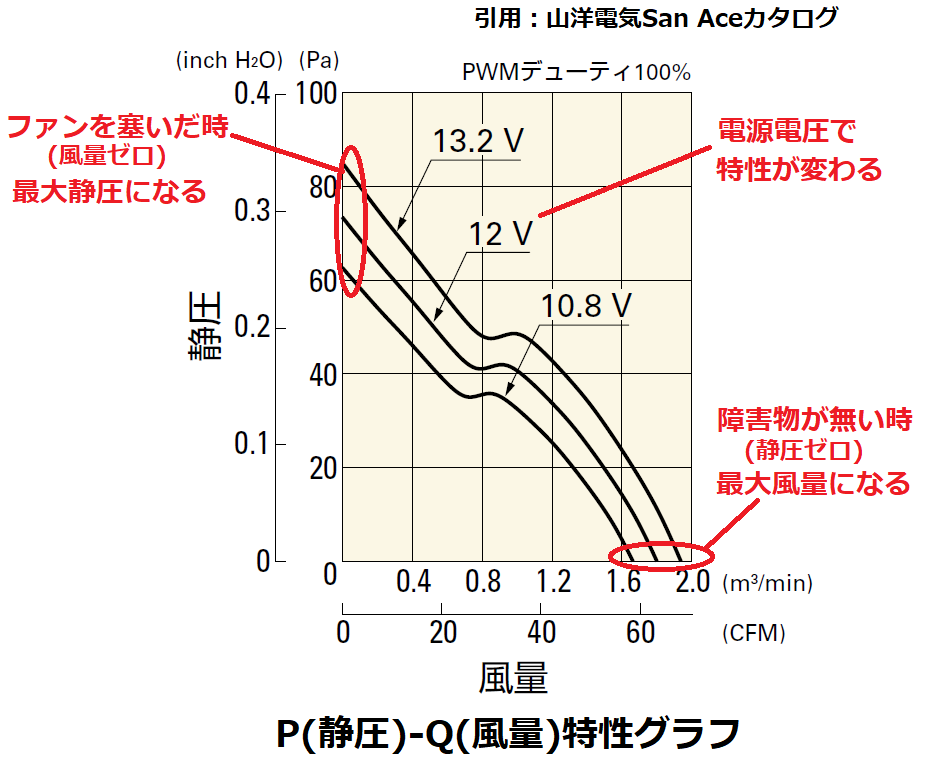
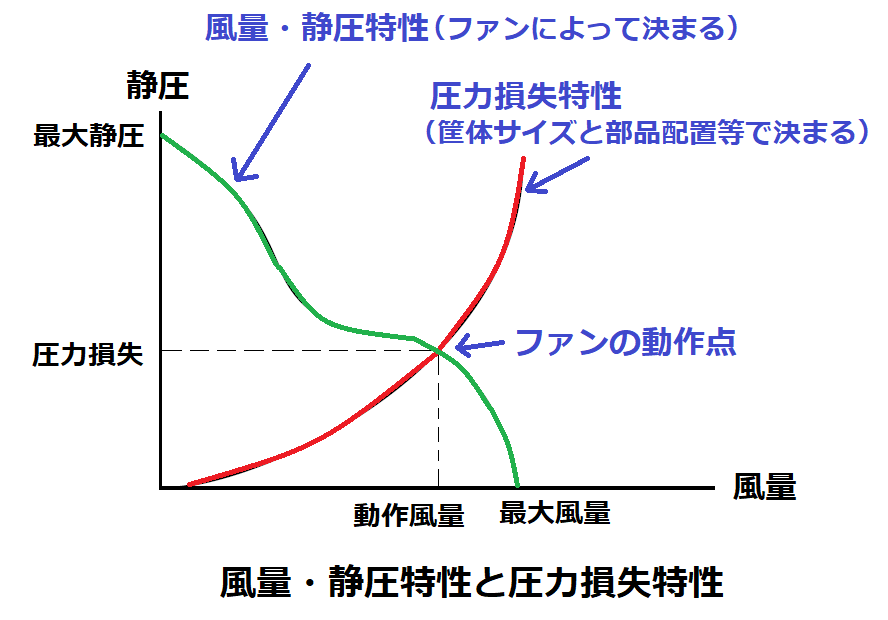
DCファンのデータシートには、風量Qと静圧Pの関係を表すP-Q特性グラフがあり、
静圧がゼロ(風の流れを阻害する物がない状態)時に最大風量となり、
風量がゼロ(障害物で風を流せない状態)時に最大静圧になります。
風量と静圧の関係について、ファンをトラックに例えて説明すると、
積載量(風量)が多いとトラック(ファン)の登坂力(静圧)が下がり、
積載量(風量)が少なければ登坂力(静圧)が上がります。
基本的には、ファンのフレームサイズが大きいほど風量が大きく、
ファンの厚さが大きいほど静圧が大きくなります。
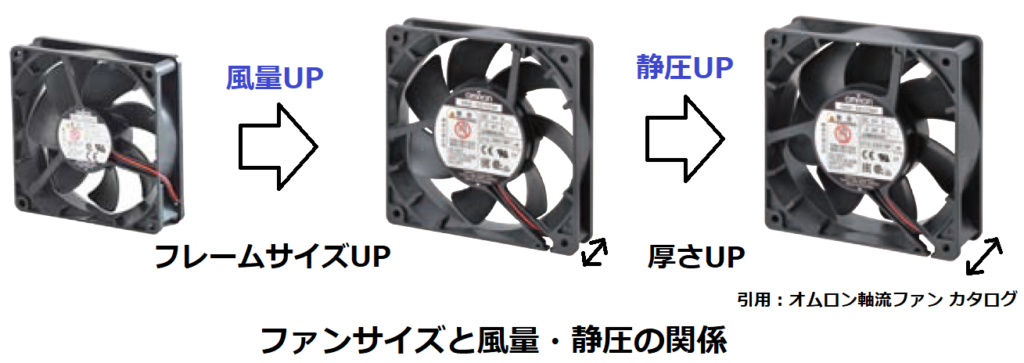
また、ファンを複数配置する場合、並列に配置すれば風量UP、
直列に配置すれば静圧がUPします(※)。
※設置する筐体や内部機器の配置によって風の流れが干渉して増えない場合もあります。

<圧力損失>
別名、通風抵抗やシステムインピーダンスとも呼ばれ、単位は静圧と同じ[Pa]です。
ファンを設置する筐体内において、空気の流れにくさを表すもので、
筐体サイズや筐体内に配置された部品の位置や数量によって決まります。
ある風量を得ようとした時に、筐体内で空気が流れにくいほど、圧力損失が大きくなります。
このため、ファンの静圧を圧力損失よりも大きくして、
温度低減に必要な風量を確保する必要があります。
DCファンの種類
ファンには、DCファンより歴史のあるAC電源動作のACファンがありますが、
電源周波数によって回転速度が決まり(※3)、回転検出センサを設ける場合、
センサ用のDC電源を別途供給する必要がある等の制約が多いことから、
速度制御やセンサ検出が容易なDC電源動作のDCファンが主流となっています(※4)。
※3:電圧(電流)調整により、トルクが変化することで回転数も変わるが、速度制御できる範囲は小さい。
※4:ファン内部にAC/DCコンバータを内蔵し、AC電源供給でDCファンを動作させるACDCファンもある。
DCファンには風の流れる方向の違いによって、以下の種類があります。
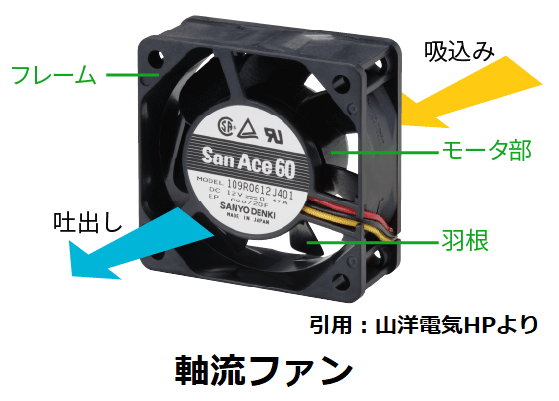
<軸流ファン>
流れる風の向きと羽根の回転軸の方向が同じことから軸流ファンと呼ばれ、
高風量、高静圧、低騒音などの特徴を持つことから、最も良く使われます。
軸流ファンには、更に以下の特殊タイプが2種類あります。
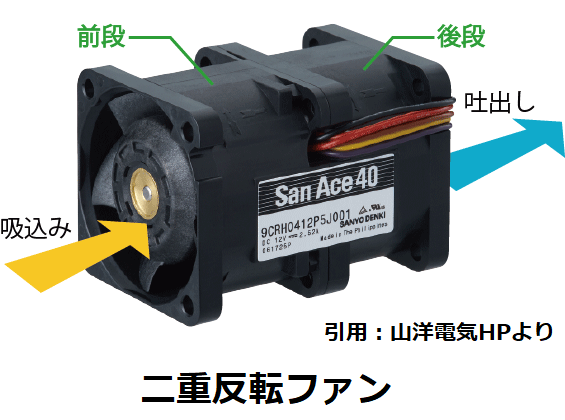
<二重反転ファン>
軸流ファンを前後2台直列にした構造を持つファンです。
後段の羽根は前段とは向きが異なり、逆回転しても風の流れは同じ方向になることで、
前段からきた風の旋回の流れを弱め、風の流れの直進性が向上することで高い静圧が得られます。
<リバーシブルフローファン>
一般的なDCファンは電源の極性を逆にしても逆回転しませんが、
このファンは外部から入力するPWM信号のON DUTYを調整(※)することで、
回転方向を正転・反転でき、吸気と排気の両方を行うことができます。
※製品例として、ON DUTYが0~50%で正転、50%~100%で反転する。

以上、説明した軸流ファンは吸い込みから吐き出しまで風の流れが直線的ですが、
装置の内部配置上、まっすぐ吐き出せない場合は以下の2タイプを用います。
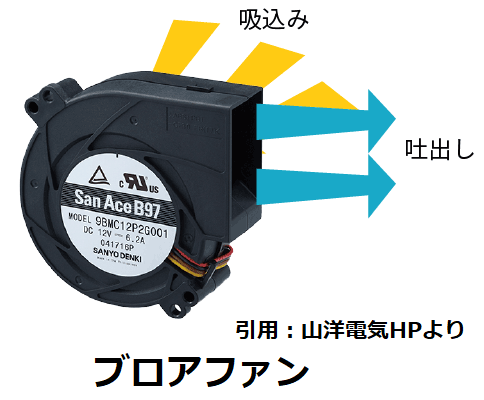
<ブロア ファン>
吸い込み口に対して吐き出し口が垂直になっており、装置の小型化に効果があります。
静圧が高いので、筐体内に部品が密集している圧力損失の高い場合に適しています。
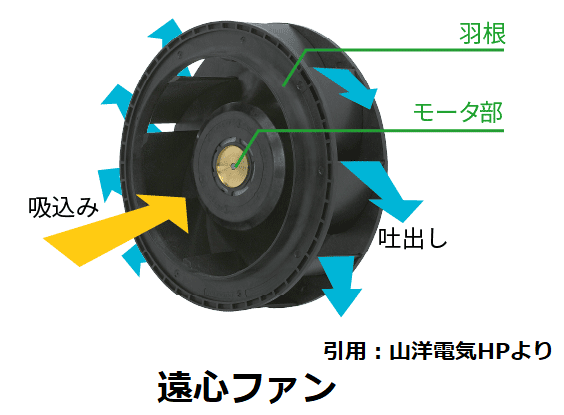
<遠心ファン>
正面から吸い込んだ風を、羽根が回転する遠心方向(ファンの側面)に吐き出します。
風量・静圧に優れており、密集した装置内の空気を引っぱり出すのに適しています。
DCファンの使い方
ここでは山洋電気(※)製の軸流ファンの使用を前提に説明します。
※山洋電気は「さんようでんき」と読みますが、「やまようでんき」と呼ばれることがあります。
その理由は、同じ読み方の三洋電機と区別していた頃の名残で、今でも「やまようのモータ」と言ったりします。
電源電圧で回転速度を制御する方法
ファンの回転速度は電源電圧によって変化させることができますが、
データシートに記載された使用電圧範囲内で行う必要があります。
使用電圧範囲は同じ定格電圧でも製品によって異なり、
山洋電気製の9RA0912シリーズ(定格12V、サイズ:80×25mm)の場合、
コントロール(PWM)入力があるタイプは10.8~13.2Vですが、
無いタイプだと7~13.8Vと、下限電圧の違いが大きいです。
実際には使用電圧範囲外でも回転しますが、
これより電圧が低いと起動できなかったり、回転が不安定な場合があり、
逆に電圧が高いと、ファンが故障したり、寿命が短くなる恐れがあります。
ファンの電源電圧を変化させて回転数を制御する方法を3つ紹介します。
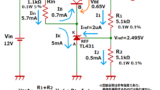
①リニアレギュレータを使用する
可変型三端子レギュレータLM317を用いて電源電圧を変化させる回路で、
可変抵抗VRを増やすと、ファンの電源電圧Voutが上昇して回転数が増加します。
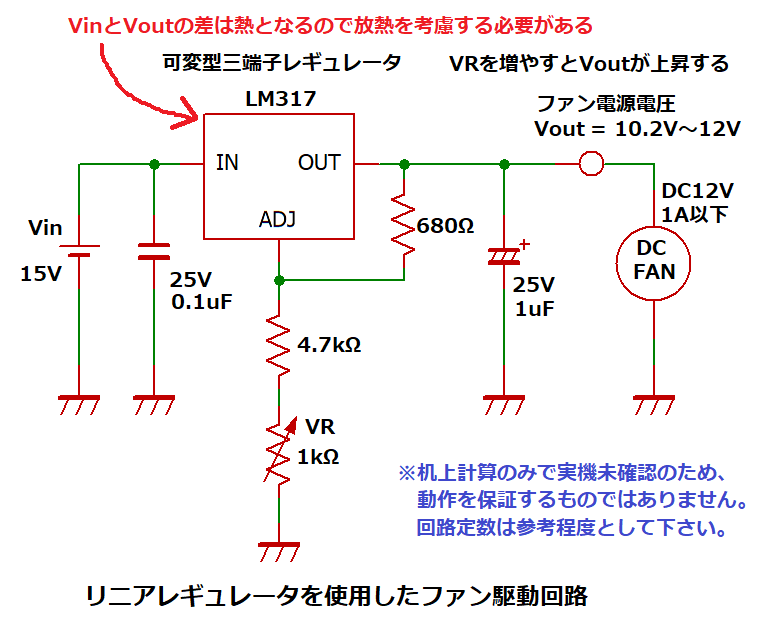
リニアレギュレータはスイッチング動作をしないためノイズが小さく、
少ない部品点数で簡単に回路を構成できますが、
入力電圧Vinとファンの電源電圧Voutとの電位差は全て熱になるため効率が悪いです。
このため、三端子レギュレータが熱で故障しないように放熱器をつけたり、
Voutとの電圧差が出来るだけ小さくなるようにVinを低くする必要があります。
LM317の回路動作についての詳細は下記記事で解説しています。
②スイッチング電源を使用する
降圧チョッパの定番ICであるLM2596を用いたスイッチング電源回路です。
可変抵抗VRを増やすと、ファンの電源電圧Voutが上昇して回転数が増加します。
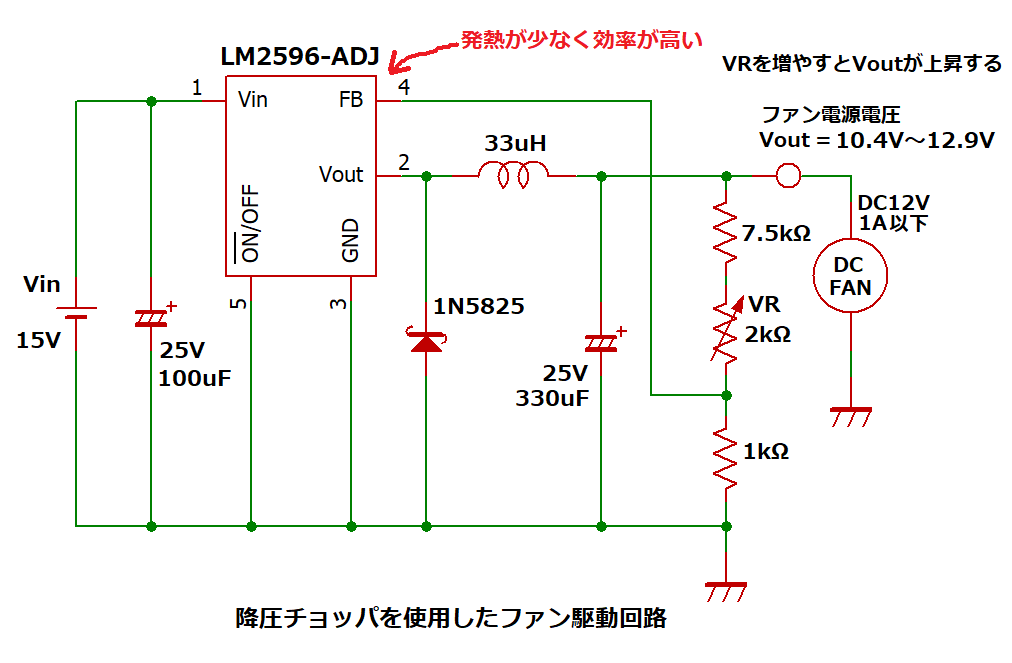
①に比べ効率が良いため発熱も低いですが、スイッチングノイズが発生します。
また、チョークコイルの選定など、回路設計が複雑になります。
LM2596の回路動作についての詳細は下記記事で解説しています。
③PWM制御を使用する
PWM(パルス幅変調)は一定周波数でON時間の割合(ON DUTY)が変化する信号で、
ここでは、タイマICで有名なNE555を用いたPWM発振回路で電源電圧を変化させます。
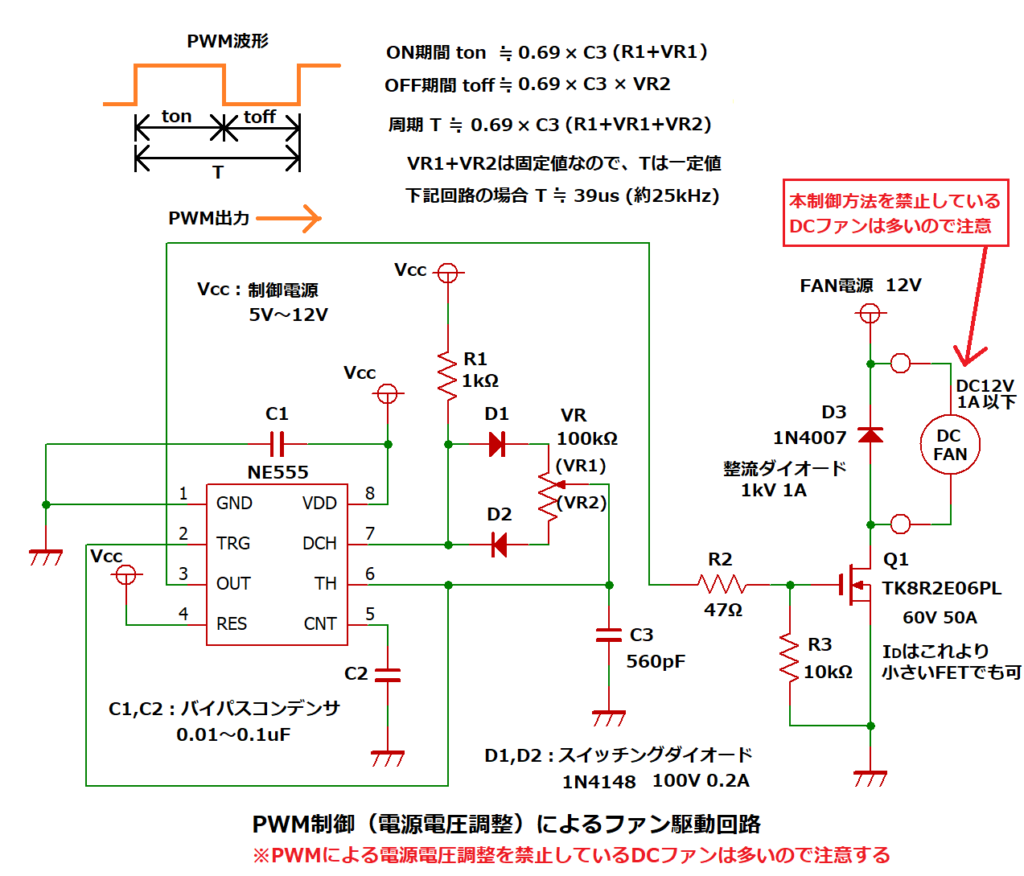
可変抵抗VR(=VR1+VR2)について、VR1を増やす(VR2が減る)とON DUTYが増え、
ファンに印加される平均電圧が上昇することで、回転数が増加します。
タイマIC 555の動作についての詳細は下記記事で解説しています。

但し、山洋電気やミネベアミツミのカタログを見ると、
このPWM制御による電源電圧調整(速度制御)を禁止しています。
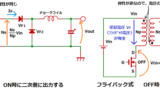
その理由ですが、DCファンはブラシと整流子が無いブラシレスモータが使われており、
下図に示す様に、コイル電流の切替をホール素子と制御ICで行っています。
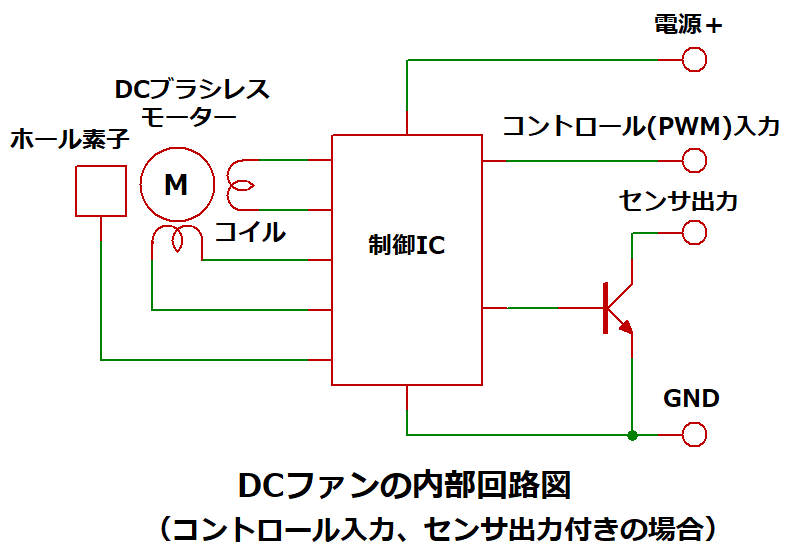
これらの電子部品は電源電圧が頻繁にON/OFFすることを前提としていないため、
異常動作を起こしたり、寿命が短くなって故障する恐れがあります。
このため、PWM制御で回転数を制御したい場合は、このあと説明する
コントロール入力(PWM)機能付きのDCファンを使用するのが望ましいです。
PWMコントロール入力を用いて回転数を制御する方法
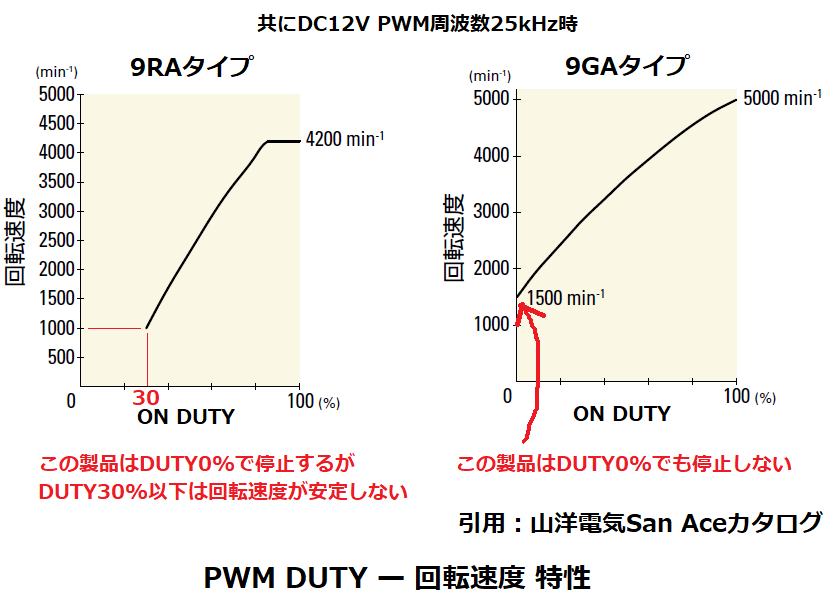
DCファンのオプションにコントロール入力があるタイプは
外部から入力するPWM信号のON DUTYに比例して回転数が高くなりますが、
ON DUTYが0%時に停止するかは製品の仕様によって異なるので注意します。
PWM信号の仕様ですが、山洋電気の場合は以下になっています。
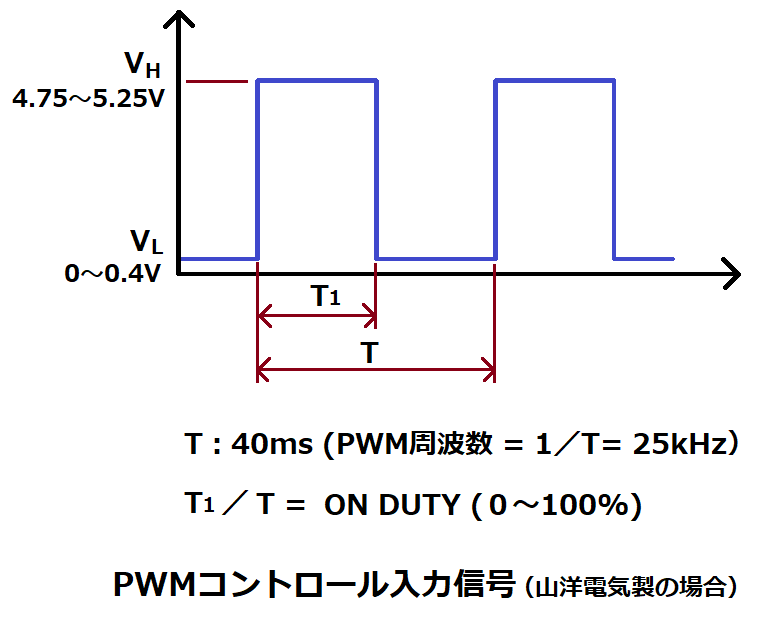
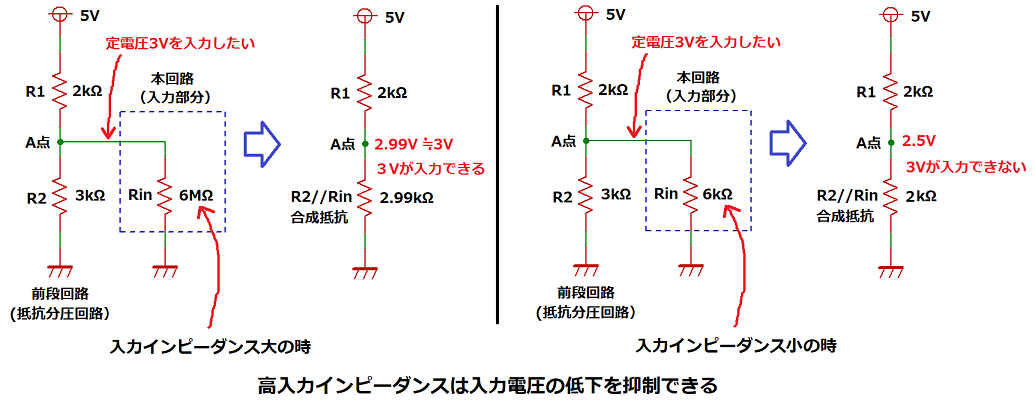
5V系CMOSロジックICの入力レベル(VIH=3.5V以上,VIL=1.5V以下)と比べ、
論理レベル判定可能な電圧範囲が狭い(VIH=4.75V以上,VIL=0.4V以下)ですが、
コントロール入力に流れる電流(シンク及びソース電流)が1mAと小さいため、
接続するICの出力電圧への影響は小さい(VOHはほぼ5V、VOLもGND付近になる)ので、
一般的な5V系ICの出力を接続できます。
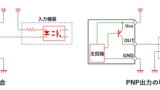
また、山洋電気製DCファンの場合、プルアップ抵抗を内蔵しているため、
オープンコレクタ出力(※5)やオープンドレイン出力をプルアップ無しで接続できますが、
これらの出力波形は立下りに比べて立上りが遅い(※6)ため、
PWM信号が歪むことで、ON DUTYに対する回転速度特性が変化する可能性があります。
PWM周波数は25kHzを推奨しており、可聴周波数範囲(20Hz〜20kHz)外にすることで、
モーターからの発振音を低減します。
※5:オープンコレクタ出力については下記記事で解説しています。
※6:オープンコレクタ出力の立上りが遅い理由については下記記事で解説しています。
回転検出センサの信号を入力する方法
DCファンのオプションにセンサ出力があるタイプは
ファンの回転状態(回転数や停止の有無など)を示す信号を出力します。
ここでは回転速度に比例したパルス信号を出力するパルスセンサを説明します。
パルス信号の仕様ですが、山洋電気の場合は以下になっており、
パルス信号のHとLパルスがそれぞれ2回でファンが1回転します。

定速回転時、H時間(T1,T3)とL時間(T2,T4)は、ほぼ同じで、
これらの時間から回転速度N[min-1]を算出できます。
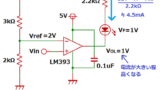
このセンサ出力はオープンコレクタなので、そのまま入力機器につないでも
センサ信号は入って来ないため、プルアップ抵抗を接続する必要があります。
このときプルアップ抵抗を介して接続した電源電圧(プルアップ電圧)が
パルス信号のHレベル電圧(VH)になるので、プルアップ電圧が5Vなら5V系、
3.3Vなら3.3V系信号にできます。(山洋電気製の場合、プルアップ電圧は30V以内)
また、Lレベル電圧(VL)が0.6V以下となる条件がコレクタ電流Icが5mA以下となっています。
これはオープンコレクタのトランジスタがON(L)時に流せる電流になるので、
それを考慮してプルアップ抵抗を選定します。
例えば、プルアップ電圧が5Vで、プルアップ抵抗を10kΩにした場合のLレベル時のIcは、
Ic=5V/10kΩ=0.5mA (※)
となり、5mA以下なのでOKです。
※厳密には入力するICからの電流も含まれますが、一般的なCMOS ICの入力抵抗は数MΩと大きく、
流れる電流も数uA程度と非常に小さいので無視できます。
ファン コントロール回路
回路例として、5V系マイコンのPWM出力とDI(デジタル入力)を、
それぞれ、コントロール入力とセンサ出力に接続した場合を示します。
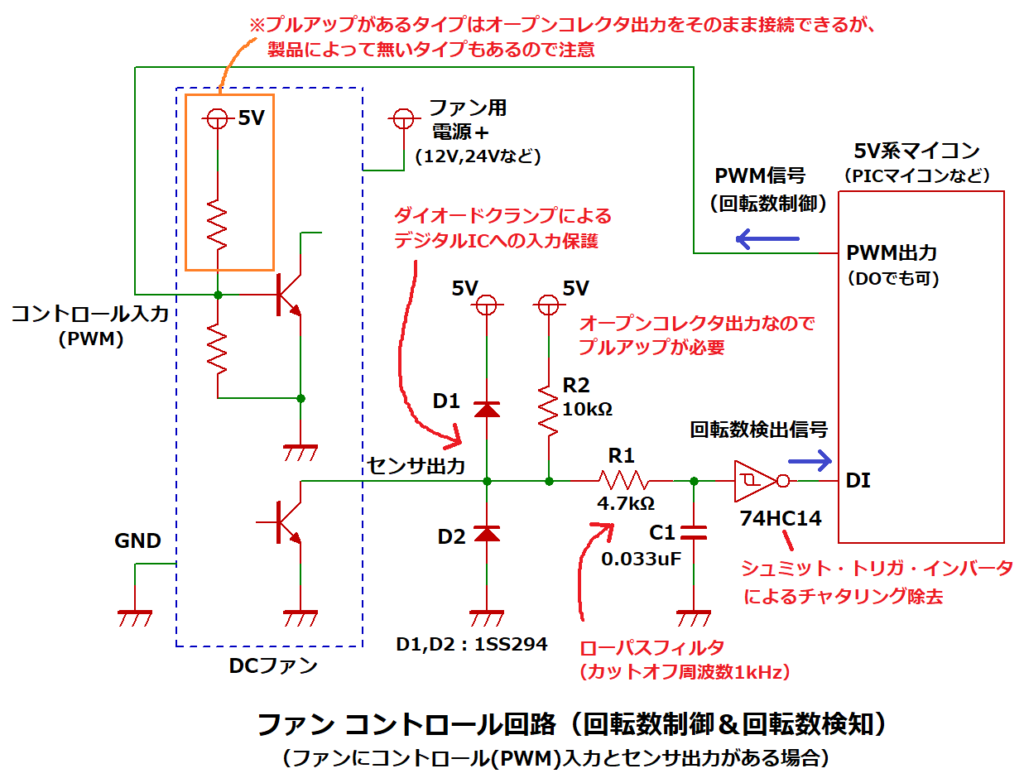
コントロール入力はマイコンからの5V系デジタル出力をそのまま接続できます。
オープンコレクタやオープンドレイン出力を用いる場合でも、
プルアップ抵抗が内蔵されている山洋電気製ファンはそのまま接続できますが、
内蔵されてないファンは、プルアップ抵抗を接続する必要があります。
また、先程のタイマIC NE555を使ったPWM制御回路についても、
Vccを5VにすればNE555の3ピン(OUT端子)をコントロール入力に接続できます。
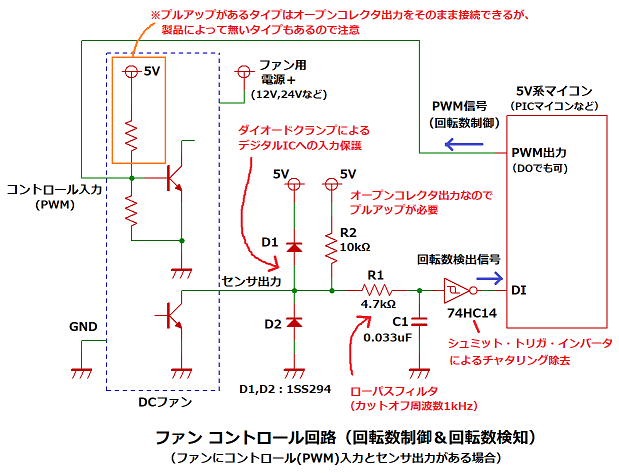
次に、センサ出力についてはR2を使い、5Vにプルアップして5V系信号にしています。
D1、D2はダイオードクランプで、0Vを下回る負電圧や5Vを上回る過電圧から
IC(ここでは74HC14)を保護します。
厳密にはダイオードの順方向電圧VFだけオーバー(0ーVF、5V+VF)するので、
VFの低い(VF=0.54V )ショットキーダイオード1SS294を使用しています。
そしてR1とC1によるローパスフィルタで高周波ノイズを除去していますが、
カットオフ周波数は、センサ信号のパルス周波数よりも十分高く設定します。
先程のセンサパルス信号の式より、回転速度N [min-1]の時のパルス周波数fは
f=2/T=2N/60 [Hz]
例えば、回転速度を5000[min-1]とした場合のパルス周波数は
f=2N/60=2×5000/60 ≒ 167 [Hz]
となるので、カットオフ周波数fcを
fc=1/(2π×R1×C1)=1kHz
に設定しています。
最後にシュミット・トリガ・インバーター74HC14により、
入力信号のチャタリングを除去してから、マイコンのDIに入力します。
シュミットトリガによるチャタリング除去は先程紹介したタイマICの記事内で解説しています。